0x34
★Kosmonauta
Wojna
Treść dla dorosłych lub kontrowersyjna

Wojna
Treść dla dorosłych lub kontrowersyjna
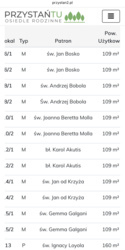
W Łomiankach pod Warszawą powstaje osiedle „tylko dla katolików”. Taka przestrzeń dla ludzi którzy chcą mieć sąsiadów tylko o swoim sposobie myślenia i podobnych przekonaniach. W planach jest osiedlowa kapliczka oraz zniżka dla osób posiadających kartę dużej rodziny. Czego to deweloper nie wymyśli.
#patodeweloperka #deweloperka #warszawa

Ile czasu minie do pierwszego złapanego pdfa? Przyjmuje zakłady

Sodoma i gomora będzie się dziala, współczynnik rozwodów wzrośnie

Ale bym mieszkał przy ulicy Sodomskiej
Zaloguj się aby komentować

Sprytnie ( ‾ʖ̫‾)
Zaloguj się aby komentować
Wiecie dlaczego astronauci używają linuxa?
Bo w kosmosie nie da się otworzyć okien.
Wiecie dlaczego programiści używają ciemnego motywu?
Bo jasne światło wabi robaki.
Wiecie dlaczego programiści Java noszą okulary?
Ponieważ nie widzą ostro.
#heheszki #humorinformatykow #suchar
@0x34 Chciałbym poznać wytłumaczenie czemu ludzie używają jasnego motywu gdziekolwiek gdy jest ciemny.
Zaloguj się aby komentować
- Dlaczego nie dokujecie?
- Dokujemy z całych sił.
- Dziwne. Nic nie czuję.
Zaloguj się aby komentować
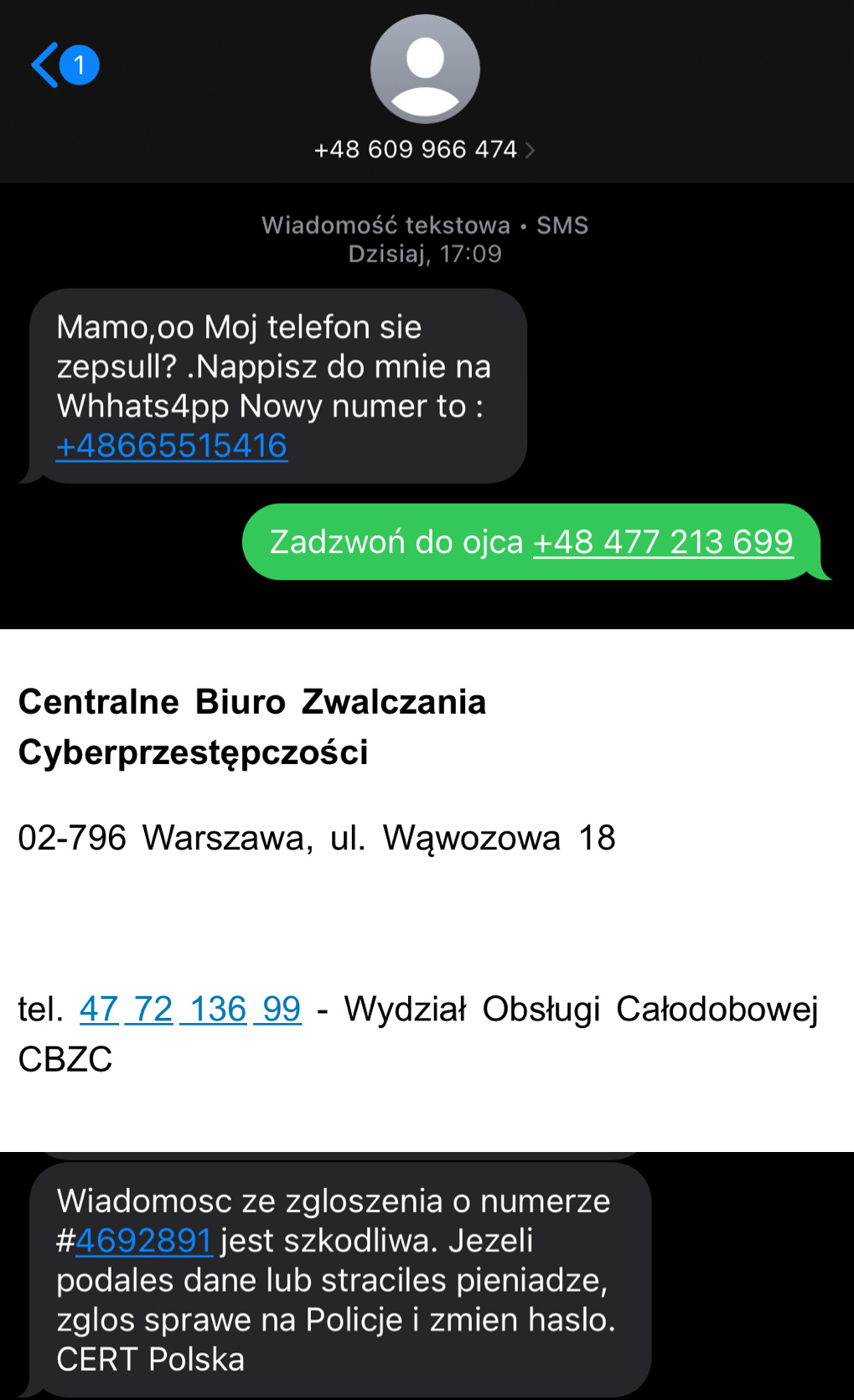
#afera #polityka #instagram #facebook #informatyka
czy wiedzieliście że wpisując Jezus Pan w wersji gwiazdkowej ***** *** na platformach meta to zostanie to przekonwertowane na *** *!!!
Czy zagraniczne korporacje ograniczają nam wolność do pisania Jezus Pan i konfederację?

@0x34 5 3 1 12
Zaloguj się aby komentować
Tą całą działalność przestępczą to się gdzieś na govie zakłada czy jakoś przez bank to się robi?
#wybory #polityka #heheszki

@0x34 normalnie do pałacu idziesz.
Zaloguj się aby komentować
Batyr mówi, że nie ogląda wiadomości bo stać go na dopalacze xD
#polityka #wybory #heheszki
Zaloguj się aby komentować
Jak myślicie. Czy takie podłączenie podłogówki jest okej czy mam zwrócić uwagę wykonawcy? Moim zdaniem trochę fuszerka



Opory przepływu to tam będą dobre XD Ale jako instalacja artystyczną daje mocne 3

Widać że fachowiec,bo spierdolić też trzeba umieć.
Pompa po prawej stronie jest źle zainstalowana. Będzie się zapowietrzać.
Zaloguj się aby komentować
Wojna
Treść dla dorosłych lub kontrowersyjna
Majster mówi „młody szpachluj ścianę w kotłowni”. Trochę mu najściemniałem że znam się na gładziach. Niby oglądałem filmiki ale jakoś nie wychodzi. Najwyżej się siateczką obleci i ściana będzie jak szkło. #heheszki #budujzhejto #0x34buduje


@0x34 Boże ile szlifowania
@0x34
Po pierwszym szlifowaniu załapiesz gdzie zrobiłeś błędy.
Powodzenia!
Komentarz usunięty przez moderatora
Zaloguj się aby komentować
O matko bosko #cybertruck na Targówku ładuje się nocom kiedy wszyscy śpiom. Nie sądziłem że dostały homologację. Przednie światło oślepia. Na filmikach wydawał się większy. Jest duży ale nie znacznie większy od europejskich aut. #tesla #technologia



@0x34 zabijcie to zanim złoży jaja!

Wygląda jakby AI reaktywowało poloneza na renderach.
na Targówku ładuje się nocom kiedy wszyscy śpiom.
@0x34 Pewnie się wstydzi.
Zaloguj się aby komentować

@0x34 żałuje, że nie zrobiłem zdjęcia kotu, który spał na płytce konstrukcyjnej od lego
Zaloguj się aby komentować
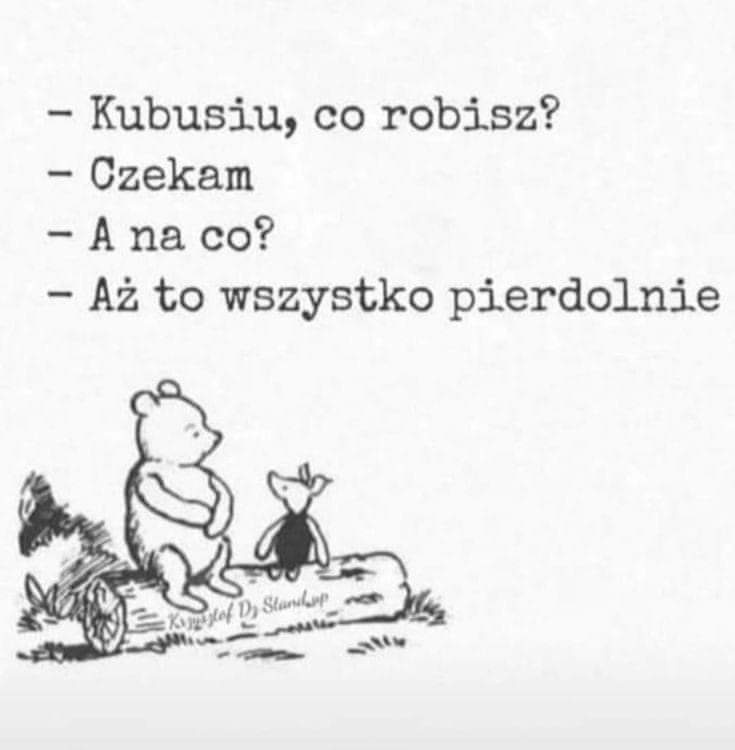
Ehh grypa typu B chuop umiera bierze leki i czeka aż to wszystko. Żona na szczęście czuwa. Kot również dba. Tak siedzę i myślę że są jakieś szanse. Męska grypa może być szalenie niebezpieczna.
#humorobrazkowy #grypa #zwolnienielekarskie


@0x34 Kot nie czuwa, kot korzysta z Twojej gorączki i się wygrzewa xD

@0x34 najważniejsze że kitku jest xd

@0x34 zdrowia dla chlopa
Zaloguj się aby komentować
potrzebuję 50 piorunów na szybko. Nie mamy czasu na wyjaśnienia. #hejtowyzwanie #glupiehejtozabawy #hejto

@0x34 nie ma problemu, ja mam do zaplusowania 20 wpisów. Obupólna korzysć
@0x34 i co, udało się?
@Dorokaito @Fletcher @uRi dzięki udało się. Pomogły też wpisy @SuperSzturmowiec @Ragnarokk i @Deykun dzięki którym poprawiło się pozycjonowanie wpisu w gorących i więcej osób mogło dać pioruna. Dobra robota!
Zaloguj się aby komentować

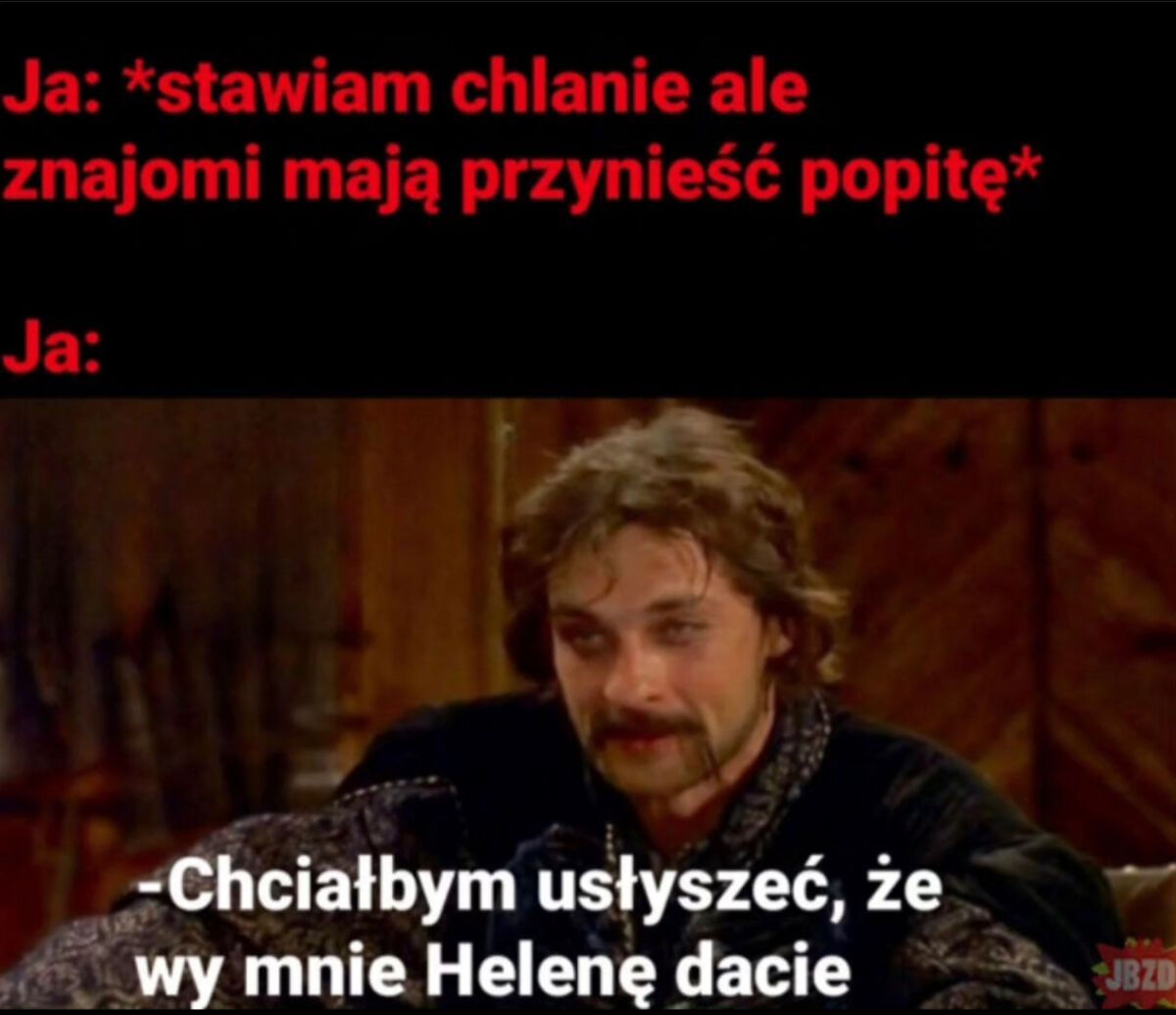
Po co smaka psuć?
@0x34 ja nie mogłem gazowanym popijać. Bleee

#ogniemimemem
Zaloguj się aby komentować

@0x34 Nigdy nie byłem w USA, więc żadnej tam biedronki nie widziałem.
Zaloguj się aby komentować
To jest porządna konsumpcja a nie jakieś tam popierdółki ekologiczne #diesel #samochody #heheszki

Zaloguj się aby komentować
Musisz wysłać SMS o treści ABS na 7998 za 200 zł to ci uaktywnią

@0x34 Po co komu ABS? Ja wolę mieć kontrolę nad hamulcami.

W alfie to trzeba kochać te zgadki żeby nią jeździć, mam znajomego co miał trzy alfy, jedna generowała chyba za mało problemów
Zaloguj się aby komentować

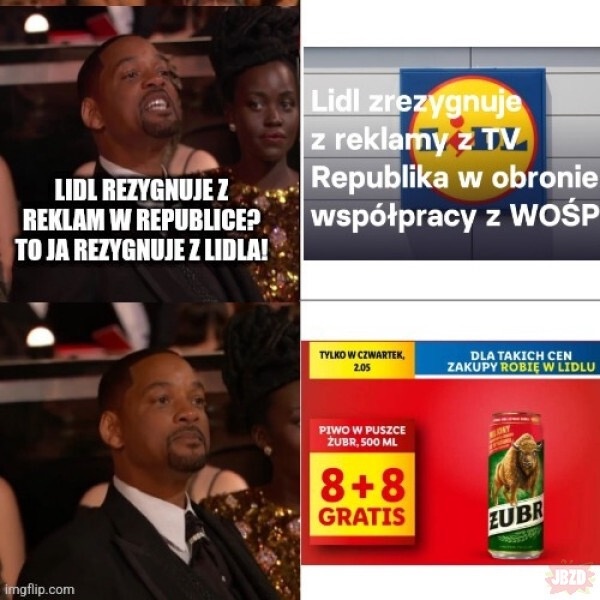
@0x34 Ja tam od dawna u niemca nie kupuje ( ͡° ͜ʖ ͡°)
Ale niezmiennie bawi mnie ich argumentacja, żeby przestać wspierać Lidl bo to niemcy - tak jakby przez orkiestrę właściciel się zmienił, a wcześniej to tylko hop, hop, hop do lidla xD
https://www.hejto.pl/wpis/a-dla-kobiet-ladna-karkoweczka-polityka-tvrepublika

Jesteś Arabem, że od prawej do lewej piszesz?
Zaloguj się aby komentować